La base del funcionament del Fenaquistoscopi pas a pas és un motor pas a pas, que és un motor que pot dividir una rotació sencera en un gran nombre de passos, per exemple, 200 passos. Així el motor es pot fer girar un angle precís [wikipedia].
El motor pas a pas, però aquest requereix d’un driver encarregat d’energitzar les diferents fases de forma seqüencial per a fer-lo girar. El driver afecta el rendiment del motor pas a pas, sent per tant un component important a l’hora d’extreure’n el màxim rendiment. Així mateix la font d’alimentació usada també afecta rendiment, sent per tant la combinació d’aquests tres elements (motor, driver i font d’alimentació) els principals factors del rendiment.


Característiques
Per a l’òptim funcionament del Fenaquistoscopi pas a pas necessitem un motor que tingui un parell motor alt, per poder fer girar discs grans i amb figures, i també que ho faci ràpid, per a produir l’efecte animat. El parell motor dels motors pas a pas ve especificat en el parell motor de parada, però el parell varia en funció de la velocitat, reduint-se a mida que aquesta s’incrementa. Aquesta relació es pot veure en les gràfiques de parell motor i velocitat que els fabricants ofereixen 1. Aquestes gràfiques per això són per una combinació de motor + driver + font d’alimentació, així que són només una indicació del comportament del motor. En qualsevol cas ens interessa mirar el parell del motor en un rang determinat de velocitats com més endavant veurem.
Hi ha dos tipus de motors pas a pas, els uni-polars i els bipolars, en aquest cas són més adequats els bipolars ja que generen més parell motor. Els m.p.p. bipolars es poden connectar en dues configuracions, anomenades en sèrie i en paral·lel. La configuració en paral·lel ofereix més parell a velocitats altes 2, per tant és la que més s’adequa a aquest projecte. En qualsevol cas en funció del motor i la velocitat desitjada podria ser que en sèrie oferís més parell.
Amb la configuració actual del projecte la velocitat a la que fem girar el motor mentre està girant és del voltant d’unes 400 revolucions per minut. Puntualitzem que és mentre està girant ja que la velocitat de gir total ve donada pel nombre d’elements animats i els frames per segon als que volem que es mostri l’animació. Però ens interessa que el moviment entre parades sigui el més ràpid possible per reduir en la mesura possible l’estela de moviment i mostrar de forma més fluida l’animació.
Els m.p.p. tenen un límit d’amperatge, però els podem fer anar a diferents voltatges usant drivers d’amperatge constant. I pel seu funcionament, per norma general si augmentem el voltatge millorem el rendiment a velocitat alta. Per tant ens interessa tenir un voltatge alt 3, el que requereix una font d’alimentació que el generi i un driver que el suporti.
En quant a la font d’alimentació a part de la característica del voltatge ja comentada, també es recomana que sigui una font d’alimentació lineal, enlloc de commutada, ja que aquestes suporten millor els pics de corrent. En qualsevol cas es pot fer servir una commutada si té marge de capacitat.
Si bé els motors pas a pas tenen un número fixe de passos per volta (habitualment 200), molts drivers permeten fer sub-passos, això el que permet és un gir més fluid del motor. En aquest cas la configuració que va donar millors resultats va ser fer sub-passos d’una 1/64 de pas. Si bé l’ús de sub-passos permet dividir el gir en fraccions més petites, fer parades en angles que no són cap dels 200 passos originals en alguns casos és problemàtic, degut a la inèrcia del disc, ja que el disc no és para al lloc correcte. Això vol dir que ens hem de limitar a que el número de parades d’un disc sigui un divisor dels passos del motor. En el cas dels motors amb 200 passos per gir serien 200, 100, 50, 40, 25, 20, 10, 8, 5, 4, 2 o 1.
En la configuració actual del Fenaquistoscopi pas a pas els components usats són:
Motor: FL86STH156-4208A-H
- Parell motor de parada: 12N/m
- Amperatge en configuració bipolar: 6A
Driver: Leadshine AM882
- Voltatge màxim: 80VDC
- Amperatge màxim: 8A pic, 5.86A RMS
- Configurat al màxim d’amperatge
Font d’alimentació: Leadshine PS806-5
- Voltatge: 68VDC
- Amperatge: 6A
- Tipus: lineal
Discs
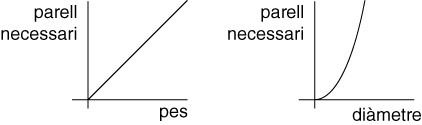
Les característiques del disc que afecten el rendiment del sistema són el pes i el diàmetre. Com més pes i diàmetre té el disc, més parell necessita el motor per a moure’l. El pes afecta de forma lineal el parell necessari, mentre que el diàmetre afecta de forma quadràtica, de forma que augmentar al doble el diàmetre del disc implica tenir un motor que tingui setze vegades més parell.
Cal tenir en compte també que les figures a l’estar situades a l’extrem del disc, i per tant lluny de l’eix, afecten més a la força necessària.
El pes i el diàmetre afecten el moment d’inèrcia que és un dels dos components per calcular el parell necessari, l’altre és l’acceleració. Com ja s’ha comentat abans ens interessa que el moviment entre parades sigui el màxim de ràpid, per tant com més alta l’acceleració millor.
Per a reduïr el pes del disc es van buscar materials lleugers i resistents, tant pel suport com pels elements animats. Així els elements que s’han fet servir són:
- Cartró ploma
- Cartró
- Fusta de balsa
- Porexpan
Per a la construcció dels suports i elements animats s’ha usat tall làser (gràcies a We Can Cut). En el cas dels suports amb cartró fent ja les incisions necessàries per la col·locació dels elements animats. I per les figures amb fusta de balsa, que posteriorment s’ha recobert de cola de fuster per augmentar-ne la resistència.
Per a poder muntar diferents discs al dispositiu es va enganxar un acoblament a l’eix del motor i a cada disc. Així cada disc tenia un extrem de l’acoblament connectat a un petit eix que alhora estava connectat a un hub circular on estava collat el disc. Si bé aquests components a l’estar prop de l’eix no afectaven tant al parell motor necessari, s’ha intentat que fossin el màxim de lleugers possibles usant materials com l’alumini. Per enganxar els acoblaments i els hubs als eixos s’ha usat una pega especial per a aquest tipus de connexions. Aquests sistema permet un canvi molt ràpid i còmode dels discs, però l’acoblament es va desenganxant i cal anar-lo apretant, fent-lo poc apte per a instal·lacions.


Control
Degut a que cada disc té unes característiques diferents (diàmetre, pes i número de parades) és necessari canviar la configuració de funcionament quan es canvia el disc. Per això el dispositiu disposa de diferents controls per a poder veure l’estat actual i canviar la velocitat del motor i el número de parades. Així com un botó per arrancar i parar i un interruptor per activar o desactivar l’acceleració inicial i final.
Codi i circuit
El codi d’Arduino i el circuit per a fer funcionar el dispositiu és relativament senzill ja que per fer girar el motor només és necessari pujar i baixar una sortida connectada al driver. La dificultat està principalment en l’ajustament dels paràmetres de funcionament.
Estructura
De cara a crear un prototip que es pogués traslladar còmodament i mostrar, es va construir una caixa de fusta per a contenir tots els elements. A l’hora de dissenyar la caixa es va tenir en compte que tant el motor pas a pas com el driver poden generar força escalfor, així que es van col·locar dos ventiladors per a refrigerar l’anterior. Així mateix també es va fer un petit forat per on es podia veure la superfície del motor de cara a poder mesurar la temperatura amb un termòmetre d’infrarojos.


Estat actual, problemes i elements a millorar
El dispositiu actual funciona correctament generant perfectament un efecte d’animació tal com es pot veure en els vídeos de l’apartat discs, però hi ha alguns elements que es podrien millorar.
El motor crea vibracions i, degut a la força que fa, fa que el dispositiu es mogui si no està ancorat a un element més estable, així que en el futur s’hauria de millor. També durant el funcionament genera soroll i s’hauria de buscar sistemes per a reduir-lo. Tal com s’ha comentat abans el sistema de subjecció dels discs és còmode ja que permet canviar-los, però no és prou estable com per a tenir-lo en funcionament una estona, així que aquest també seria un apartat a millorar.
Una característica desitjable a millorar seria el rendiment per poder fer discs més grans, usar elements animats més pesats i/o augmentar la velocitat de rotació per reduir l’estela de moviment.
Documentació
Llistat de materials
Base
- Motor FL86STH156-4208A-H [enllaç]
- Driver Leadshine AM882 [enllaç]
- Font d’alimentació Leadshine PS806-5 [enllaç]
- Arduino
Muntatge
- Acobladors SRJ JM30C (15.875mm i 10mm) [enllaç]
- 10mm Nexus Robot Hub [enllaç]
- Barra acer o alumini 10mm
- Loctite 638 [enllaç]
Control
- 4 botons per pujar/baixar paràmetres
- 2 4×7 segments amb interfície serial [enllaç]
- 1 botó per posar en marxa
- 1 led per indicar estat
 Este obra está bajo una Licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 Internacional.
Este obra está bajo una Licencia Creative Commons Atribución-NoComercial-CompartirIgual 4.0 Internacional.